"Vortex structures generated by the flapping wings of a mosquito. Simulations conducted using in-house immersed boundary solver ViCar3D by Jung Hee Seo and Rajat Mittal."
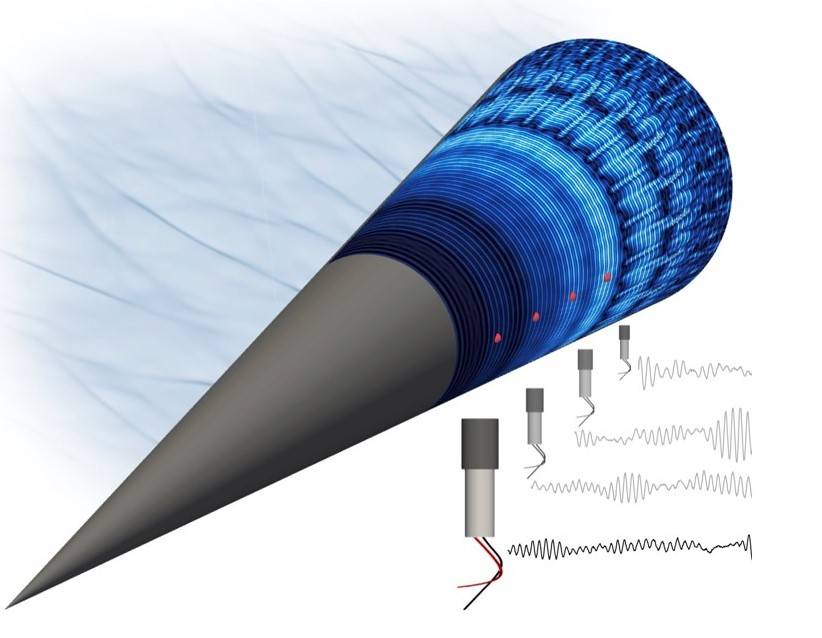
"Transitional, Hypersonic Boundary-Layer Flow over a Cone." Courtesy of Tamer Zaki.
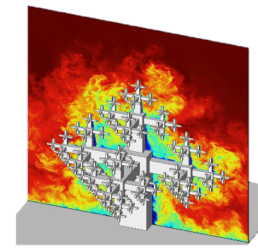
"Large Eddy Simulation of turbulent flow over multi-scale self-similar object" (S. Chester & C. Meneveau)."
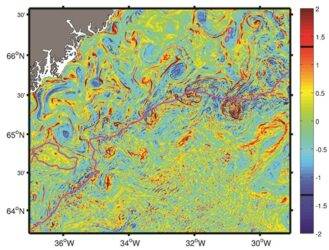
“Simulated surface vertical vorticity field in the North Atlantic Ocean near east Greenland. From Magaldi & Haine (2015).”
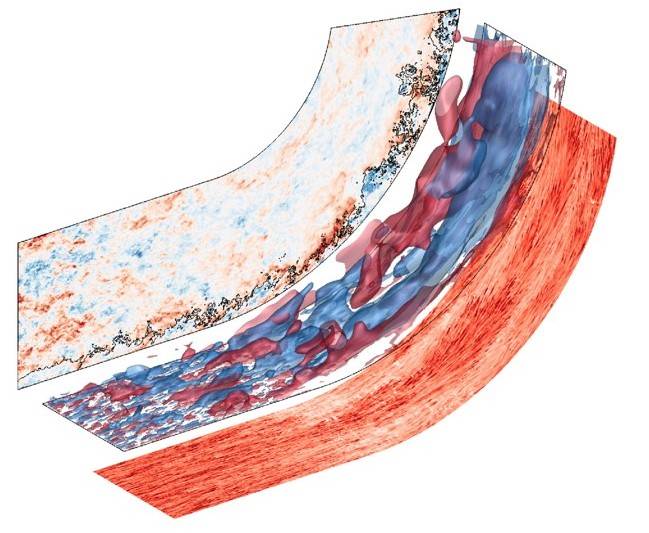
"Turbulent Boundary Layer over a Concave Wall." Courtesy of Tamer Zaki.
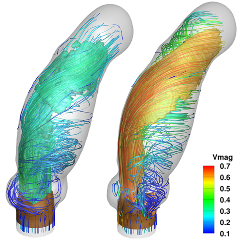
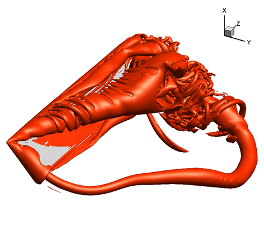
"Flow and vortex structures through a healthy (left) and bicuspid aortic valve. Simulations conducted using in-house immersed boundary solver ViCar3D by Shantanu Bailoor and Rajat Mittal."
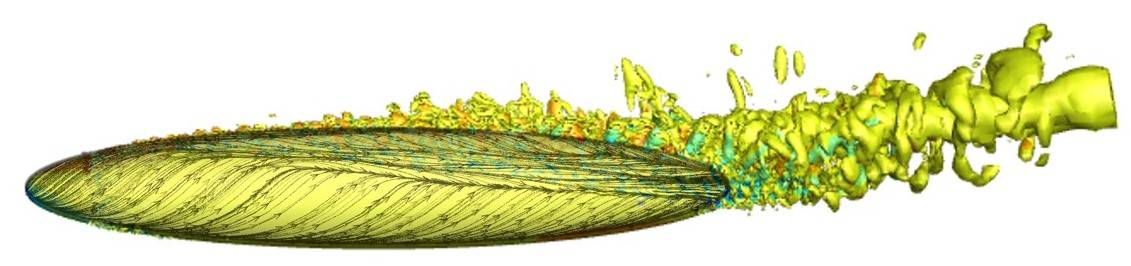
"Separated Flow over a Prolate Spheroid." Courtesy of Tamer Zaki.
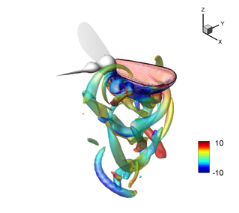
"Vortex structures generated by a rotating drone rotor blade. Simulations conducted using in-house immersed boundary solver ViCar3D by Jung Hee Seo and Rajat Mittal."
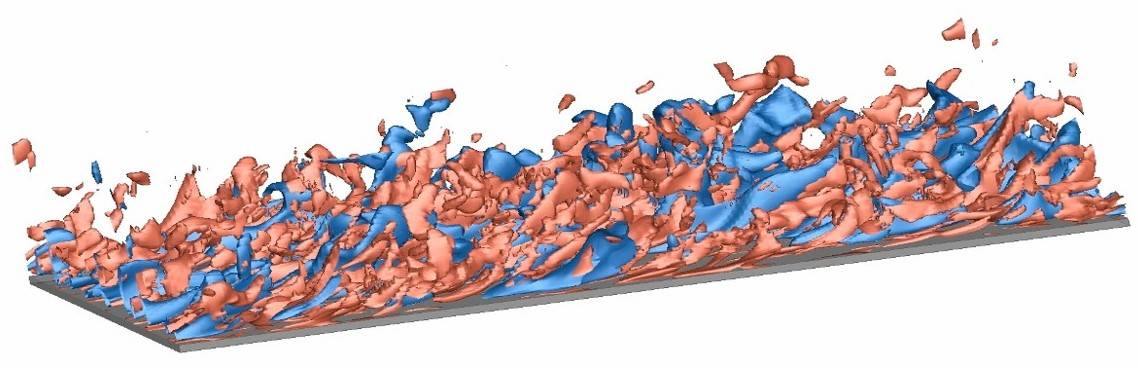
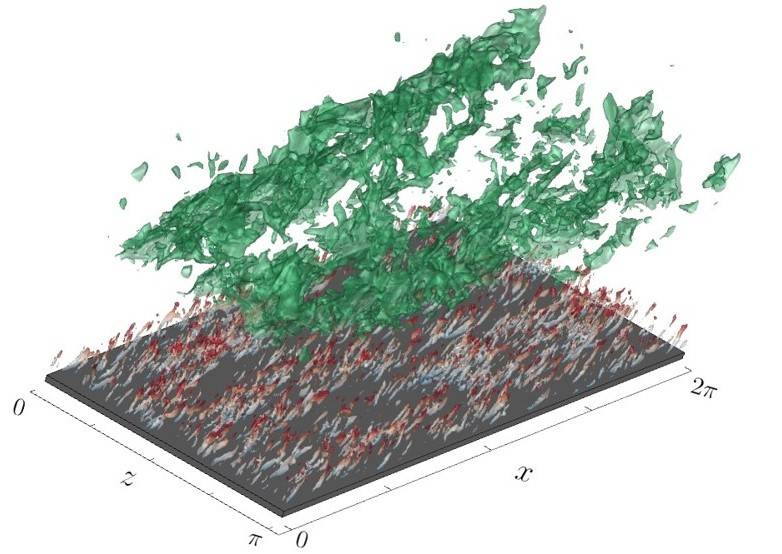
"Turbulent Boundary Layer: Outer Large-Scale Motions and Near-Wall Vortical Structures." Courtesy of Tamer Zaki.
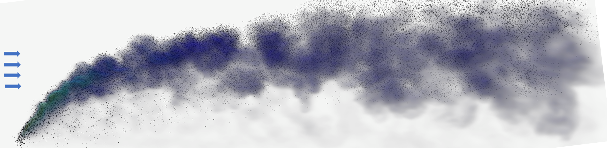
"Simulation of plume in cross-flow" (A. Aiyer & C. Meneveau)."
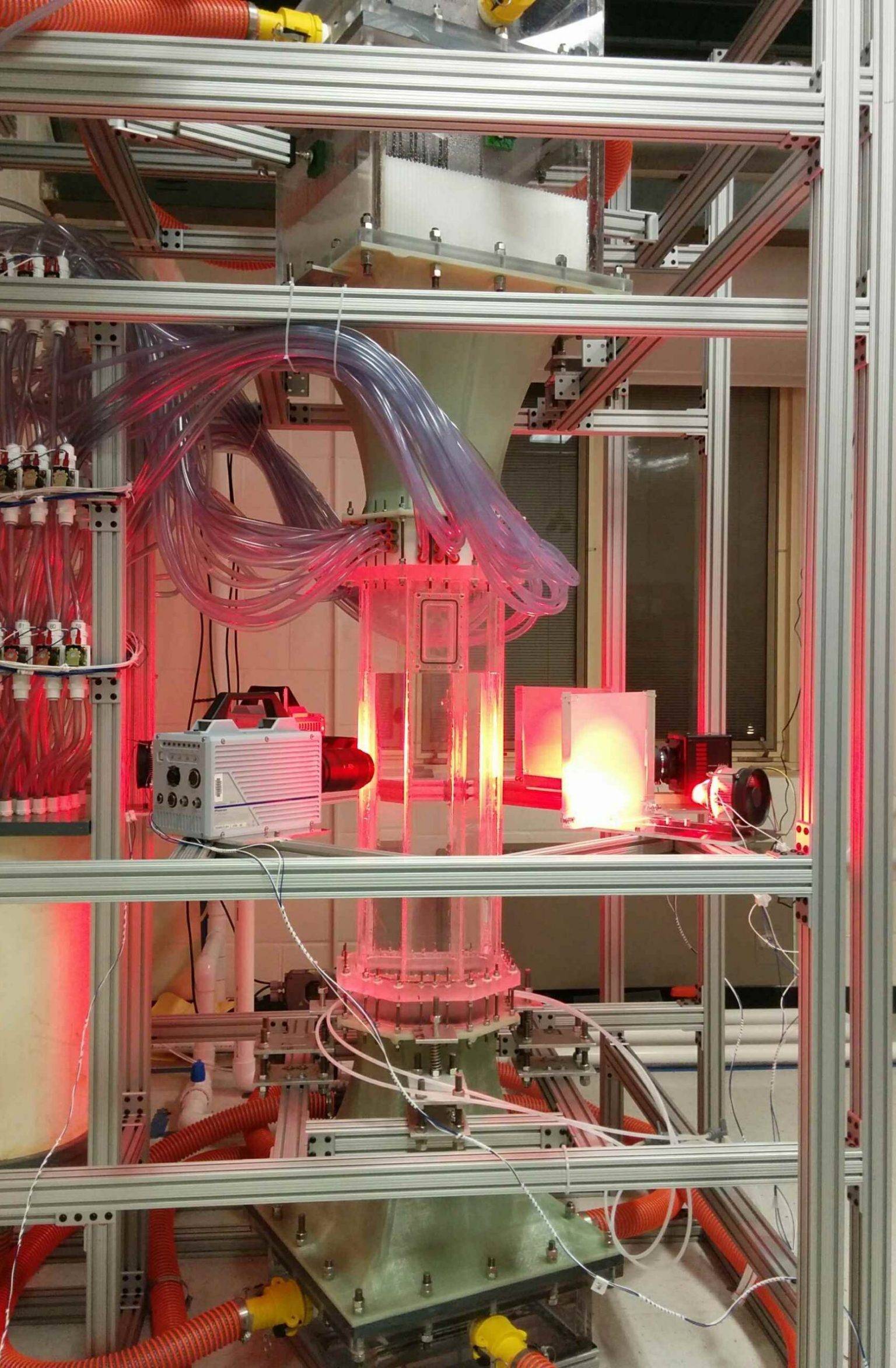
Rui Ni Lab
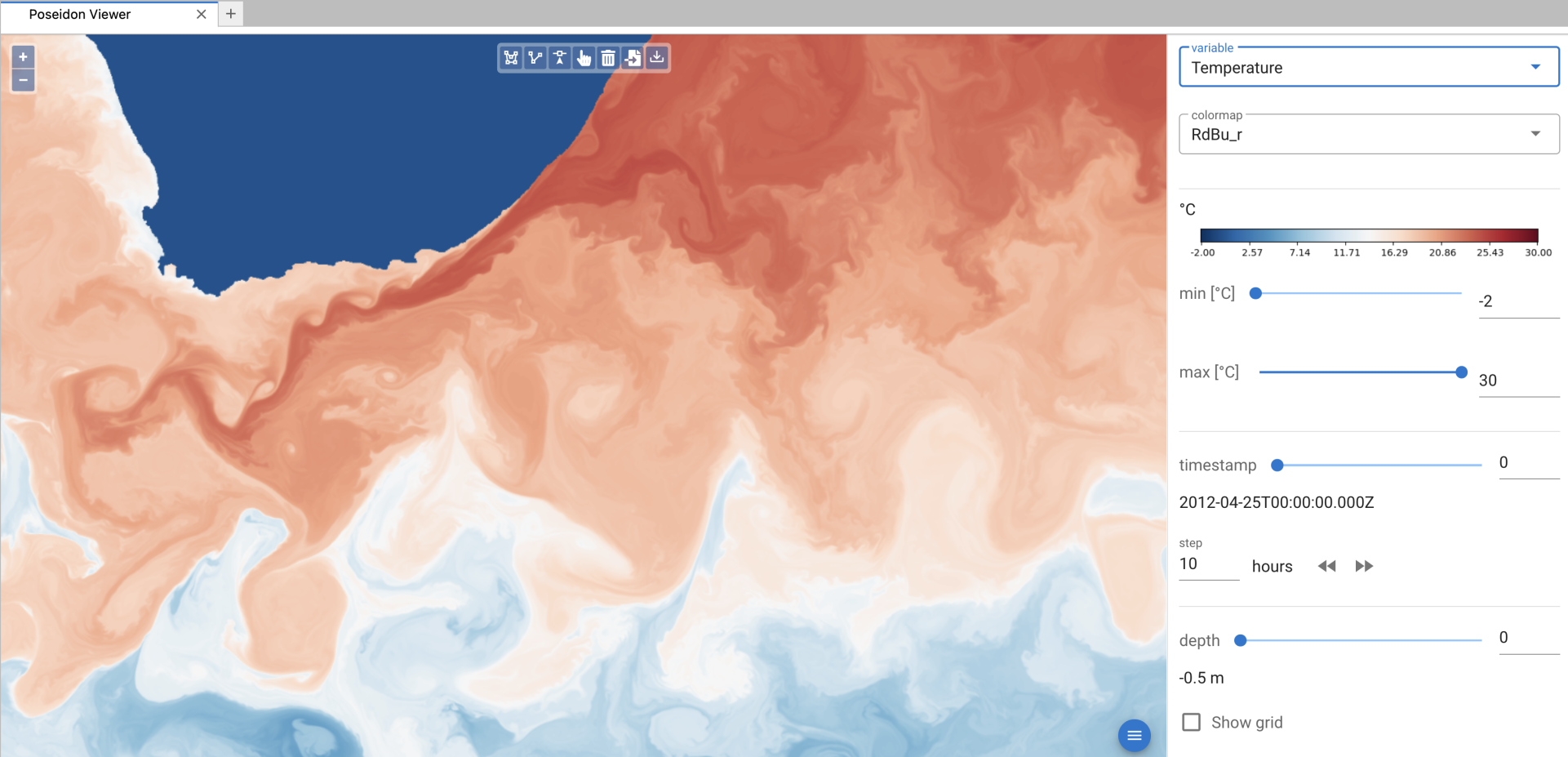
"Sea-surface temperature south of Africa in the Poseidon-Project LLC4320 dataset. From the Poseidon-viewer tool" (courtesy of Thomas Haine).
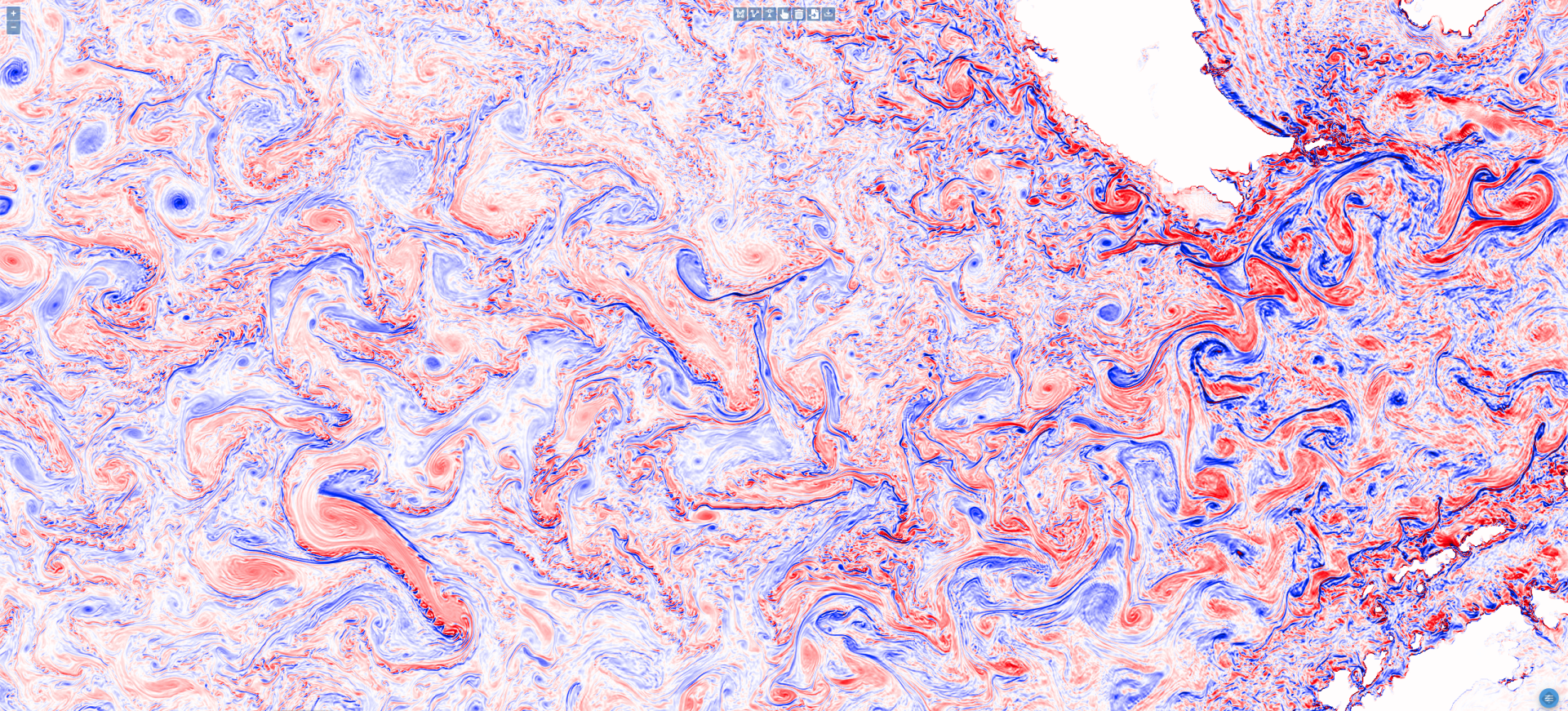
"Sea-surface vertical relative vorticity in the Poseidon-Project LLC4320 dataset in the southeast Pacific Ocean" (courtesy of Thomas Haine).
About CEAFM
The Center for Environmental and Applied Fluid Mechanics (CEAFM) fosters research and teaching involving fluid mechanics by bringing together students, faculty, and researchers from the Whiting School of Engineering, the Krieger School of Arts and Sciences, and the Applied Physics Laboratory. Research areas of the CEAFM faculty and students include fluid flow phenomena in engineering and science covering a wide range of spatial and temporal scales. This includes fluid flows that occur in industrial, transportation, and manufacturing applications, in ocean and coastal engineering, in the treatment of aquatic and air-borne contaminants, in planetary atmospheres and oceans, rivers, subsurface waters, and fluids deep in the earth’s interior, in biological systems, and in the microscopic environments relevant to micro-fluidic engineering applications and to aquatic and atmospheric chemistry and biology.
CEAFM Symposium
The 2024 CEAFM-Burgers-GWU Research Symposium on Environmental and Applied Fluid Dynamics will take place on the University of Maryland at College Park campus on Wednesday, May 29, 2024.
Center for Environmental and Applied Fluid Mechanics