An international team led by the
Johns Hopkins Applied
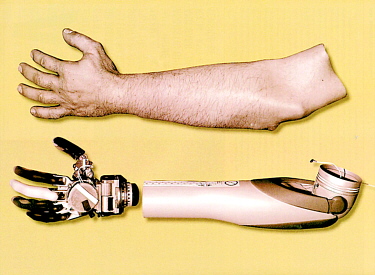
Physics Laboratory has developed a prototype of the
first fully integrated prosthetic arm that can be
controlled naturally, provides sensory feedback and allows
for eight degrees of freedom — a level of control far
beyond the current state of the art for prosthetic limbs.
Proto 1, developed in the Revolutionizing Prosthetics
Program for the Defense Advanced Research Projects Agency,
is a complete limb system that also includes a virtual
environment used for patient training and clinical
configuration, and to record limb movements and control
signals during clinical investigations.
The DARPA prosthetics program is an ambitious effort
to provide the most advanced medical and rehabilitative
technologies for military personnel injured in the line of
duty. Over the last year, the APL-led Revolutionizing
Prosthetics 2009 team has worked to develop a prosthetic
arm that will restore significant function and sensory
perception of the natural limb. Proto 1 and its virtual
environment system were delivered to DARPA ahead of
schedule, and Proto 1 was fitted for clinical evaluations
conducted by team partners at the Rehabilitation Institute
of Chicago, or RIC, in January and February.
"This progress represents the first major step in a
very challenging program that spans four years and involves
more than 30 partners, including government agencies,
universities and private firms from the United States,
Europe and Canada," said APL's Stuart Harshbarger, who
leads the program. "The development of this first prototype
within the first year of this program is a remarkable
accomplishment by a highly talented and motivated team and
serves as validation that we will be able to implement
DARPA's vision to provide, by 2009, a mechanical arm that
closely mimics the properties and sensory perception of a
biological limb."
The advanced degree of natural control and integrated
sensory feedback demonstrated with Proto 1 are enabled by
Targeted Muscle Reinnervation, a technique pioneered by
Todd Kuiken at the Rehabilitation Institute of Chicago that
involves the transfer of residual nerves from an amputated
limb to unused muscle regions in appropriate proximity to
the injury. In this case, the nerves were transferred to
the pectoral area of the patient's chest. This procedure
provides for a more intuitive use of a prosthetic arm and
allows for the natural sensation of grip strength and
touch.
During clinical evaluation of the limb at RIC, a
patient of Kuiken's demonstrated substantial improvements
in functional testing, such as the ability to reposition
his thumb for different grips, remove a credit card from a
pocket, stack cups while controlling his grip force using
sensory feedback vs. vision and to walk using the free
swing mode of the limb for a more natural gait. Harshbarger
says that working closely with patients is crucial to
helping the team understand the attributes patients look
for in prosthetics. The limb system also includes a
natural-looking artificial covering that was created using
photographs of the patient's native limb taken before the
accident.
APL, which was responsible for much of the design and
fabrication of Proto 1, and other team members are already
hard at work on a second prototype, expected to be unveiled
in late summer. It will have more than 25 degrees of
freedom and the strength and speed of movement approaching
the capabilities of the human limb, combined with more than
80 individual sensory elements for feedback of touch,
temperature and limb position.
"There is still significant work to be done to
determine how best to control this number of degrees of
freedom, and ultimately how to incorporate sensory feedback
based on these sensory inputs within the human nervous
system," Harshbarger said. "The APL team is already driving
a virtual model of Proto 2 with data recorded during the
clinical evaluation of Proto 1, and the team is working to
identify a robust set of grasps that can be controlled by a
second patient later this year."
Also part of the work on the second prototype will be
the functional demonstration of Injectable MyoElectric
Sensor, or IMES, devices — very small injectable or
surgically implantable devices used to measure muscle
activity at the source vs. surface electrodes on the skin
that were used during testing of the first prototype.
"The IMES devices, coupled with [Targeted Muscle
Reinnervation] procedures, promise to increase the fidelity
of control and can be used in certain injury scenarios to
provide a significant improvement on their own merit,"
Harshbarger said. Further neural integration work includes
fabrication of early devices to integrate directly with the
peripheral nervous system and the cortex.

 GO TO
GO TO